SceneClarity: A Unified Framework for Scene Reliability Estimation and Classification in Autonomous Vehicle Perception
UTMIST Machine Learning Project ML Research Project August 2025 – April 2026
PyTorchTensorFlowscikit-learnPandasNumPyJupyter NotebookGoogle ColabYOLOv11MobileNetV3ResNet-50LaneNetDockerREST APIsNext.jsReactGitHubVisual Studio CodeJira
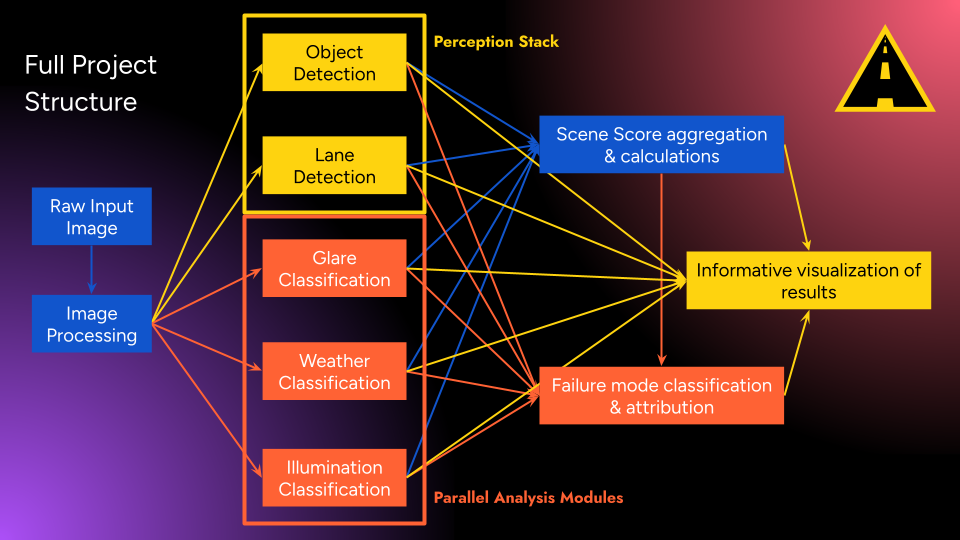
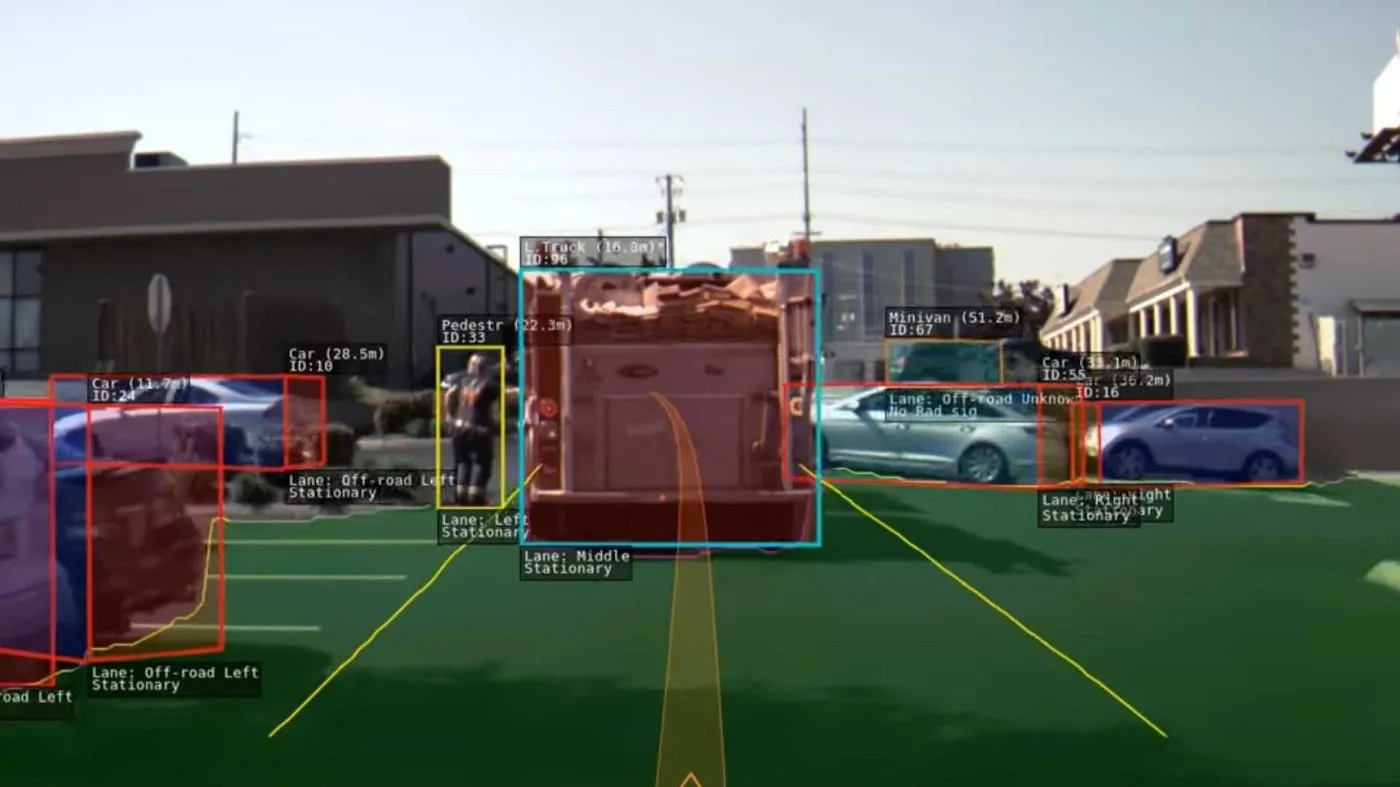
- Led the development of the SceneClarity ML project, a modular framework for estimating scene-level reliability in autonomous vehicle perception, addressing degradation under adverse conditions such as fog, rain, snow, and glare where failures often co-occur and are difficult to diagnose at the system level.
- The architecture separates perception, environmental inference, and aggregation modules through a fixed interface, allowing components to be replaced without redesigning the aggregation logic.
- Introduces a framework that aggregates perception outputs and environmental signals into a global reliability score with attribution to likely degradation factors, representing reliability as a decomposition over semantically interpretable scene-level components, unlike per-prediction uncertainty methods.
- Implemented as a real-time system producing structured outputs and visualizations to support failure analysis, safety monitoring, and debugging.
Vision Transformer (ViT-B/16) Architecture Implementation arrow_outward
 GitHub
GitHub PythonPyTorchTorchvisionTorchinfoNumPyMatplotlibPILKagglehubJupyter NotebookGoogle ColabGitGitHub
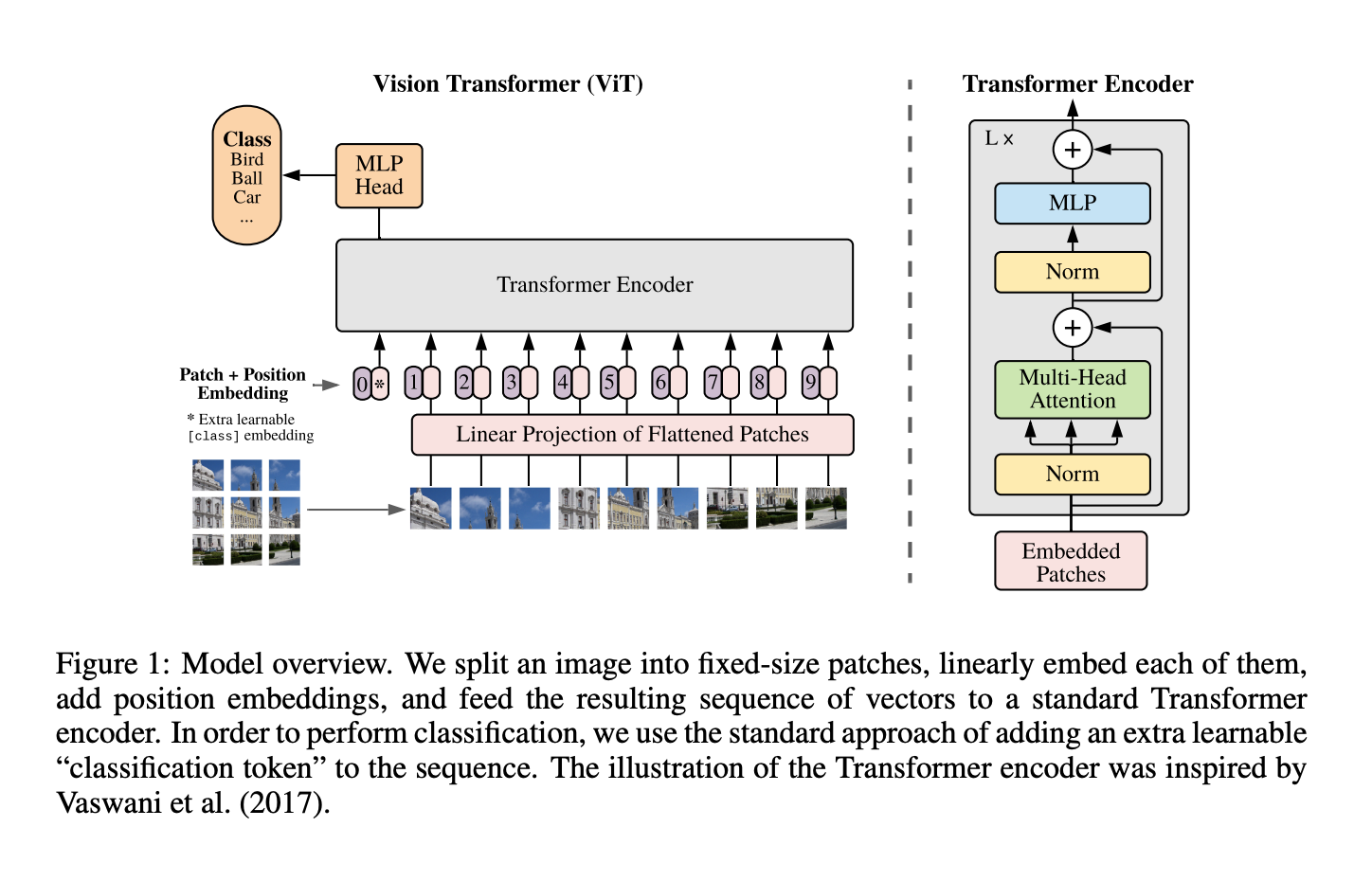
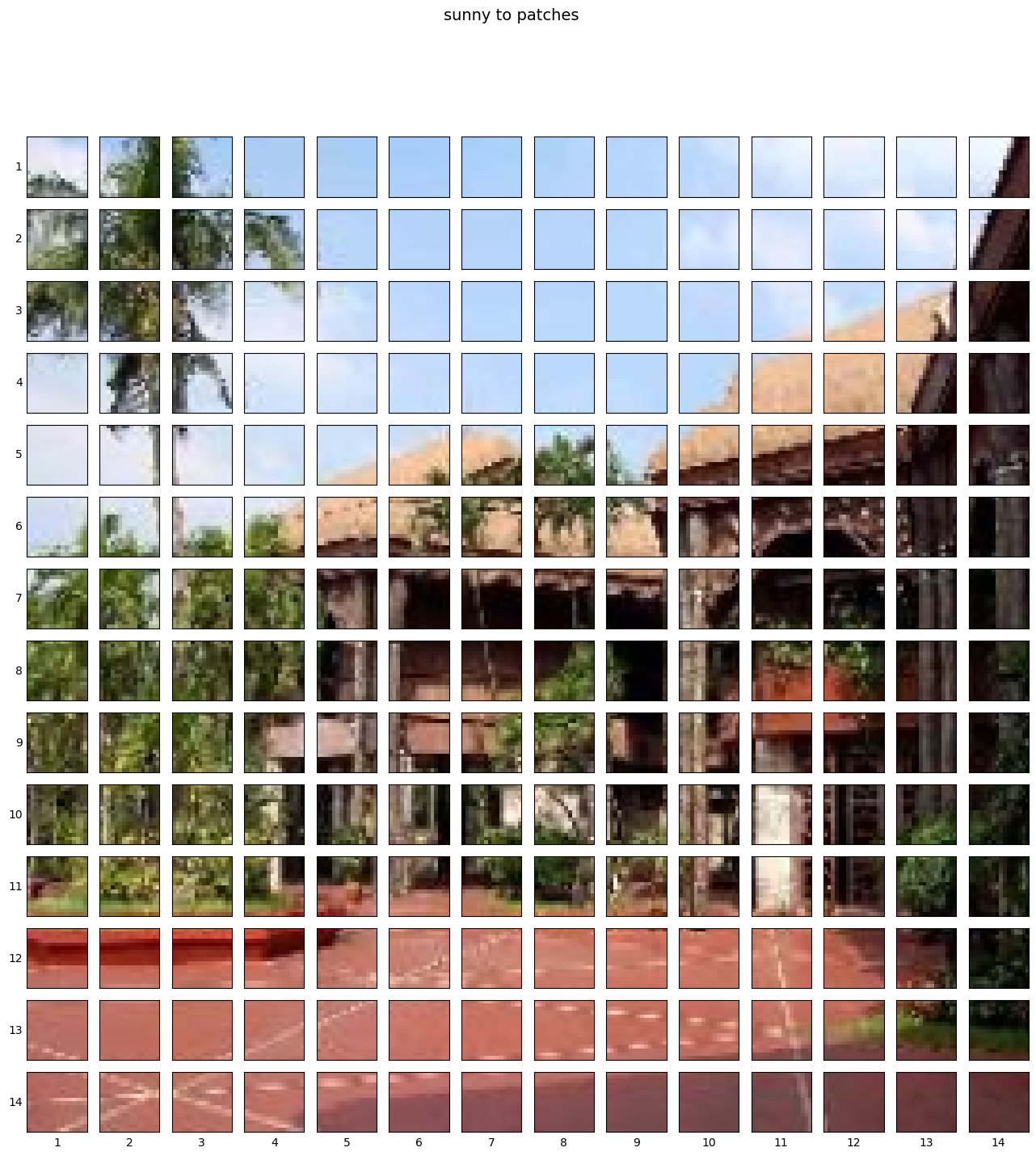
- Implemented the Vision Transformer (ViT-B/16) architecture from scratch in PyTorch, following the paper "An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale." Manually built all core components, including convolutional patch embeddings, class and positional embeddings, Multi-Head Self-Attention (MSA) and MLP blocks with Layer Normalization (LN) and residual connections, as well as the final classification head.
- Used the equations and architectural definitions from the original paper to reason about data flow and tensor transformations throughout the model, explicitly tracking tensor shapes step-by-step from input images to output classification in order to ensure correctness and deepen understanding of the model structure.
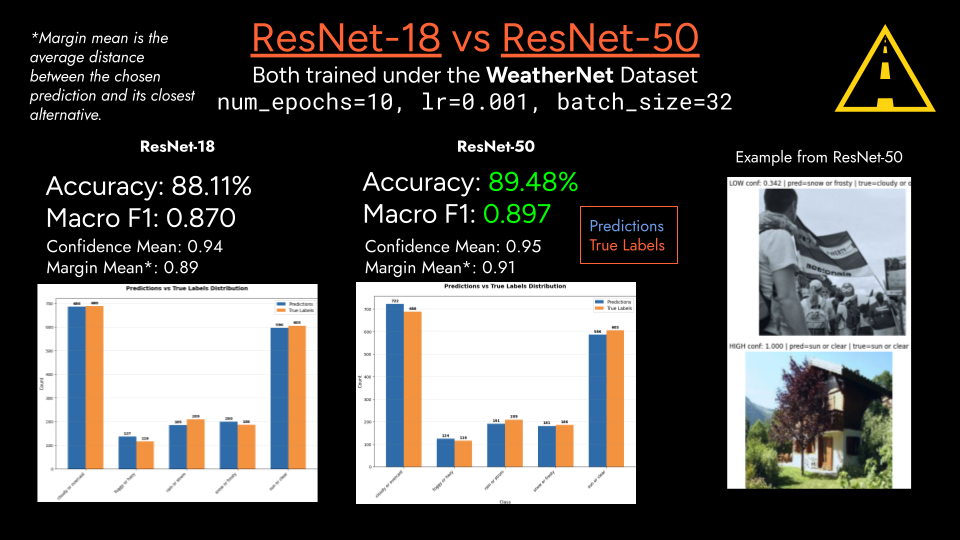
- Validated the implementation end-to-end by training the model from scratch on a 5-class weather image classification dataset sourced from Kaggle. Documented training simplifications relative to the paper and compared the custom implementation with PyTorch's built-in ViT.
Autonomous Vehicle Path Planning, Deep Learning & Ethics
International Baccalaureate Programme IB Extended Essay November 2023 – February 2025
PythonTensorFlowPyTorch
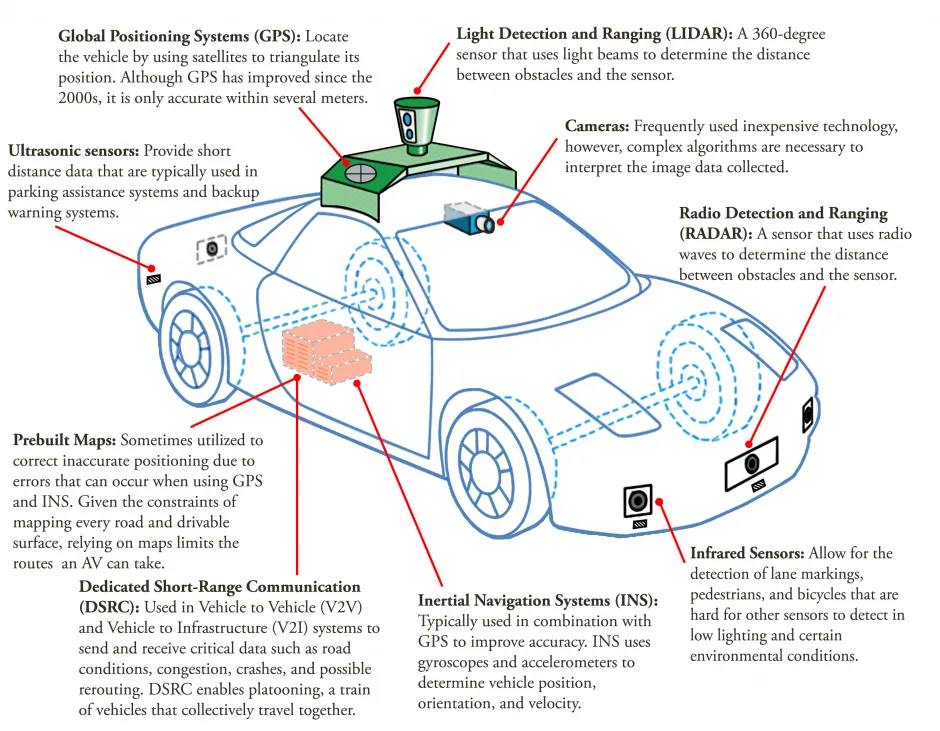
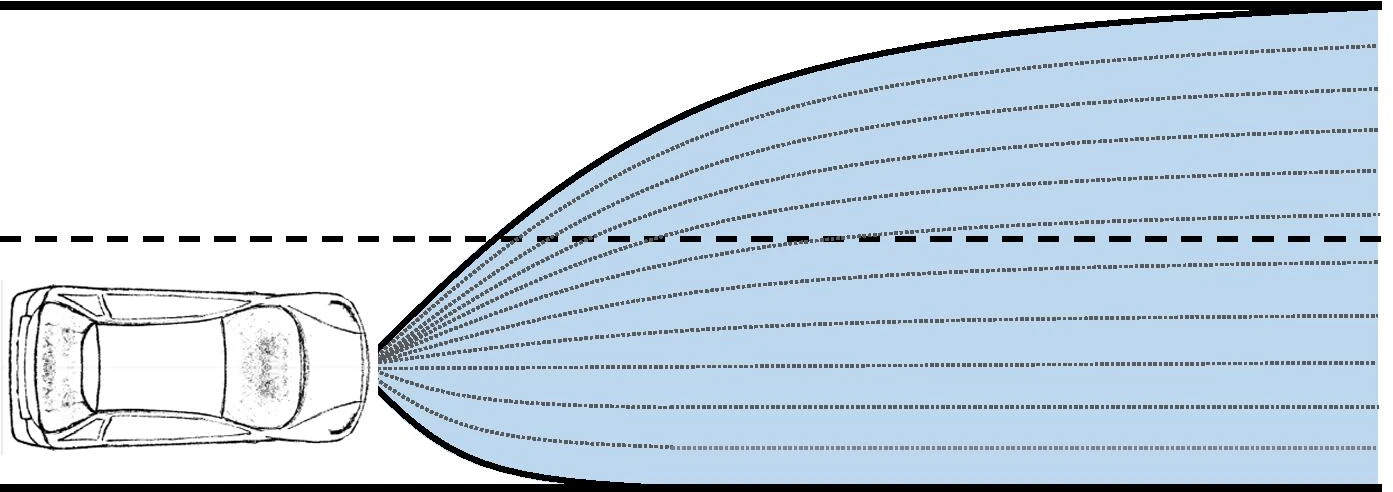
- Produced a 4000-word research paper evaluating the societal, ethical, and regulatory impacts of autonomous vehicles (AVs) through empirical research and academic literature. Analyzed deep learning applications in AV perception and path-planning systems, assessing both technical capabilities and ethical limitations.
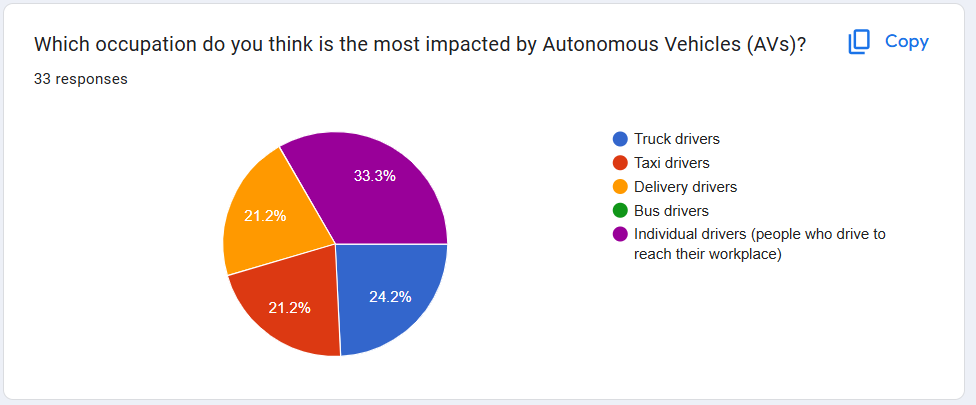
- Designed and conducted a primary survey on public perceptions of AV safety and adoption, generating quantitative insights through data analysis. Synthesized primary and secondary sources to develop evidence-based predictions on future AV regulation and adoption trends.